BGS Remote Drill Two
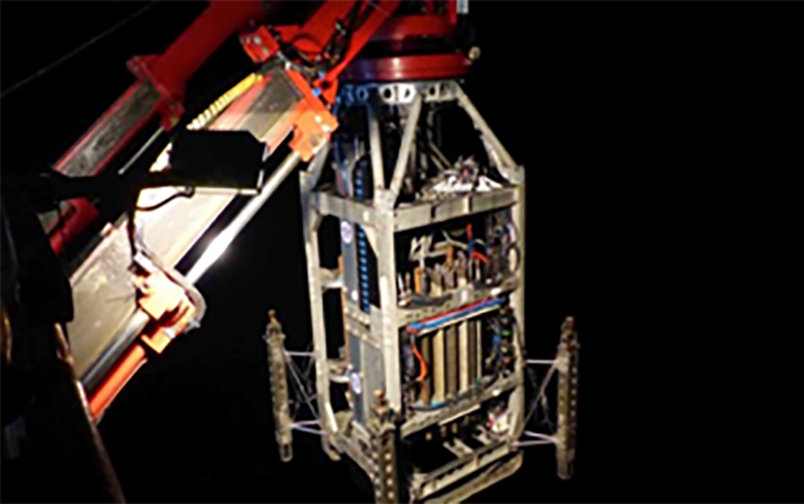
The BGS Remote Drill Two is an advanced seafloor robotic drilling and coring system. It can penetrate up to 50m below the seabed, operate down to water depths of 4,000m, and can drill and core a wide variety of lithologies ranging from consolidated sediments to hard igneous rocks.
RD2 uses a triple wall wireline drilling system that can continuously core in 1.72-metre sections with a core diameter of 61mm and is controlled by a team a team of nine engineers and technicians from a dedicated 20′ control cabin using industry-standard telemetry and power transmission technology.
The system is fitted with a wide range of cameras and sensors to aid drilling operations and to provide additional scientific data. There are 12 cameras on board with six live feeds, as well as a CTD, water sampler, altimeter and a real-time 3D imaging sonar.
During the Project Ultra, RD2 will be used to collect borehole rock samples from the interiors of the SMS deposits, providing both invaluable rock samples and geophysical data.
Hybis
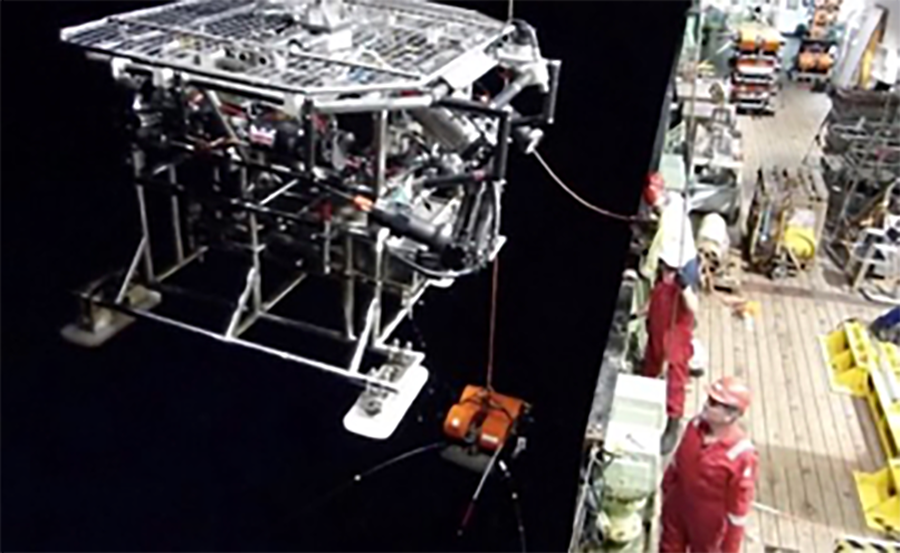
The Hydraulic Benthic Interactive Sampler (HyBIS) is a modular, versatile, robotic underwater vehicle (RUV) capable of reaching depths of 6,000 metres, developed and operated by the National Oceanography Centre. Controlled via fibre optic cable connected to the ship, HyBIS is equipped with sampling grab, cameras and equipment used to record conditions in the deep sea.
In contrast to a conventional remotely operated vehicle (ROV), HyBis is not neutrally buoyant. Both the descent and the ascent of the HyBIS, as well as the operating depth are controlled from the ship by the fibre optical cable. Therefore, HyBis can deploy and recover a net load up to 700kg (sampling equipment and sampling material), which is several times the payload of an ROV.
Preparation, launch and recovery of the HyBIS robotic underwater vehicle. It is fitted with a manipulator arm, sample basket, three cameras and a scanning sonar. It is used to survey drilling sites, place landing lights to guide the RD2 onto the seafloor and map and sample the surface of the SMS deposits.
Remotely Operated Vehicle (ROV) Isis
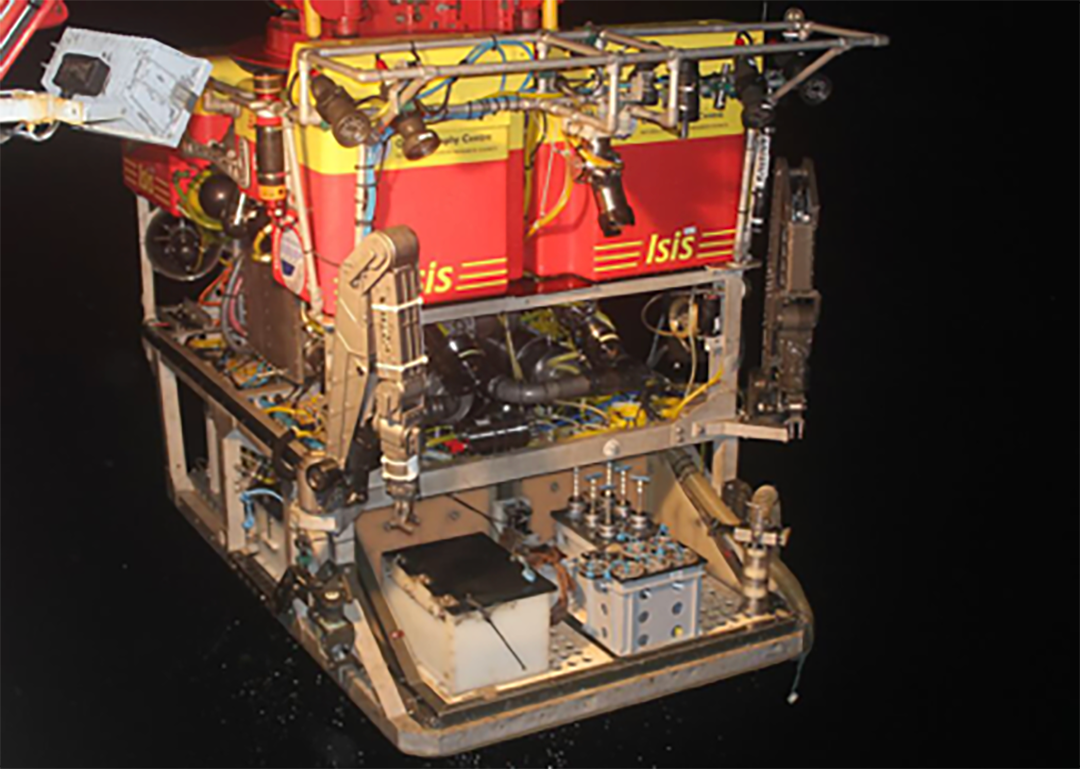
Isis is the UK’s deepest diving ROV dedicated to science. Isis collects samples, drills sediment cores and shoots high-definition video and stills at ocean depths of up to 6,500 metres (four miles).
The vehicle is operated by a team of seven engineers and supported with containerised control room, workshop and spares storage, with a launch and recovery system. Isis can be manoeuvred precisely with its thrusters (propellers) and the deep sea can be observed in high resolution through several cameras positioned around the vehicle.
The dexterous manipulator arms can recover small, delicate objects more precisely than any other sampling system and complex in situ experiments can be achieved maintaining the environmental conditions and minimising sample damage caused by recovery to the surface.
During Project Ultra, Isis will be deployed on the second expedition and used to carry out seafloor experiments, collect geological samples and to visually map the study area.
OBX-90 acquisition system
The OBX-90 ocean bottom seismometer is a contains three orthogonally oriented 15Hz geophones, and a single hydrophone in a package weighing about 17kg, and with dimensions 50cm × 20cm × 10cm. Its battery allows it to be deployed for up to 90 days.

One OBX-90 will be attached to the BGS rockdrill to record the direct vibrations at the drill; a further 18 will be deployed by the Hybis in an array around the drill, so that the vibrations caused by the drill can be measured.
We can use the difference in the time the vibrations take to reach each OBX-90 to map the seismic velocities below the seabed.